 Legacy of FIBO
Legacy of FIBO

ดำเนินการให้กับ : สถาบันสารสนเทศทรัพยากรน้ำและการเกษตร (องค์การมหาชน)
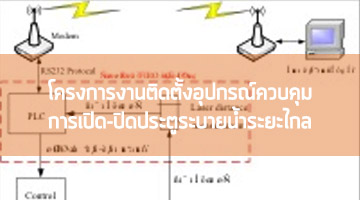
สถาบันวิทยาการหุ่นยนต์ภาคสนาม ได้นำเทคโนโลยีทางด้านหุ่นยนต์ที่เรียกว่า “Robotic Mapping” มาใช้เพื่อเพิ่มประสิทธิภาพในการสำรวจเพื่อหยั่งความลึก โดยเน้นที่การพัฒนาระบบควบคุมและติดตามเรือจากระยะไกลเพื่อช่วยในการเก็บข้อมูล รวมถึงการพัฒนาระบบประมวลผลเพื่อสร้างแผนที่ (เช่น ภาพ 3 มิติของตลิ่ง ท้องน้ำ และสิ่งก่อสร้างตามแนว) ซึ่งจะนำไปสู่การสำรวจที่มีประสิทธิภาพยิ่งขึ้นทั้งทางด้านความถูกต้องของข้อมูลและความสะดวกในการปฏิบัติงาน รวมถึงยังเป็นการลดการนำเข้าเทคโนโลยีจากต่างประเทศซึ่งมีราคาแพง นอกจากนี้ ในอนาคต ระบบที่ว่ายังสามารถนำไปประยุกต์ใช้งานในด้านอื่นๆ ได้อีก อาทิเช่น การทำแผนที่ 3 มิติของสิ่งก่อสร้างและพื้นดิน เพื่อศึกษาระดับน้ำท่วม การสำรวจท้องน้ำตามแนวชายฝั่ง เพื่อการจัดการทรัพยากร การสำรวจไฟป่า เป็นต้น