

 Legacy of FIBO
Legacy of FIBO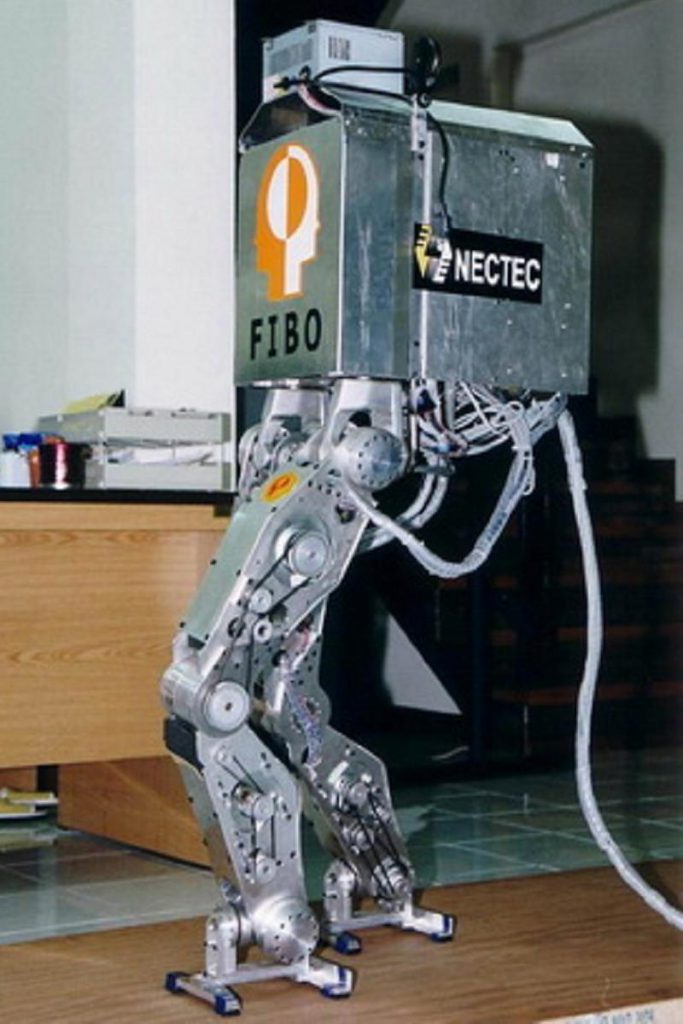
| Project | Two-Legged, Humanoid Robot “Somjook” |
| Researcher | Assoc. Prof. Dr. Djitt Laowattana, Dr. Nachol Chaiyaratana, Thitisak Chanprom |
| Paisarn Suwanthep, Bantoon Srisuwan, Hataitep Wongsuwarn | |
| Funding | |
| Published Year | 2000 |
| Keyword | Humanoid Robot |
Abstract
In the past, researches on the development of robotic technology have focused on fixed robots to increase production capacity and efficiency. However, fixed robots cannot be used in particular jobs, for example, to explore and work in places too dangerous for people. Today, many internationally acclaimed higher-education institutions, namely, M.I.T, Harvard University, Stanford University, and Waseda University (JAPAN), have changed their focus to research and develop biped mobile robots. Even Honda, a giant automobile manufacturer, has invested a billion yen to research and build a humanoid robot. Mobile robots with two legs are very agile and can move in places that wheeled mobile robots cannot access. Institute of Field Robotics (FIBO), King Mongkut’s University of Technology Thonburi (KMUTT), recognized the importance of the technology that Thailand can develop through the research on humanoid robots, for example, Real-time Three-Dimensional Balancing. FIBO planned to research and build a two-legged humanoid robot by using the dynamic analysis proposed by Thomas R. Kane, ZMP, Gravity Reaction Force, Conservation of Energy, and implementing vision system, image processing system, and artificial intelligence for more stability. Moreover, the institute researches on mobility to develop robots that can move omnidirectionally on a rough surface. This project is a theoretical development and proposes an approach to the verification and validation by testing the leg movements of the prototype. Each leg consists of six degrees of freedom. We have planned the research as follows:
- To study biomechanics to find suitable parameters for the mechanical design of a prototype biped robot
- To research on mobility and dexterity of the prototype biped robot
- To design Passive Real-Time and Active Real-Time control systems
- To incorporate the vision system to pre-program the robot’s walking style in advance by using Artificial Intelligence (AI)
 |
 |
We are currently in the process of kinematic and dynamic analysis as shown in figure 1, which is to analyze the Lump Mass Model. This prototype humanoid robot is expected to be the first of its kind in Thailand. FIBO has started to develop and share the new technology that shows the capability of the automation system developed mainly by fundamental analysis.