

 Legacy of FIBO
Legacy of FIBO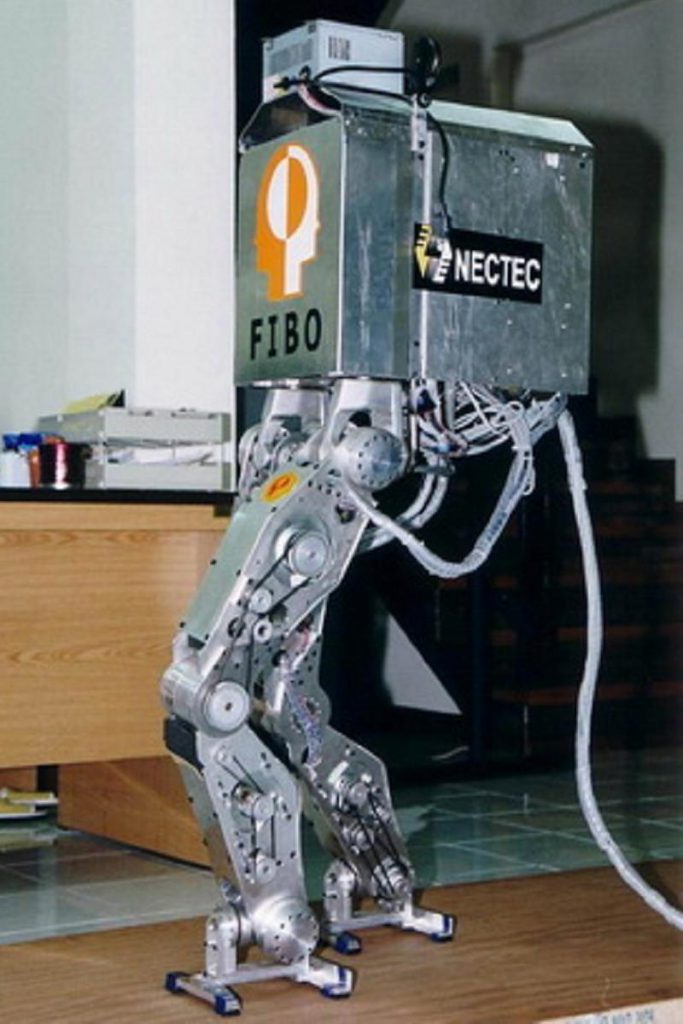
| ชื่อผลงาน | หุ่นยนต์ฮิวมานอยด์เดินสองขาส้มจุก |
| Humanoid “Somjook” | |
| ชื่อผู้วิจัย | รศ.ดร.ชิต เหล่าวัฒนา ดร.ณชล ไชยรัตนะ |
| นายฐิติศักดิ์ จันทร์พรหม นายไพศาล สุวรรณเทพ นายบัณฑูร ศรีสุวรรณ นายหทัยเทพ วงศ์สุวรรณ | |
| แหล่งให้ทุน | |
| ปีที่เผยแพร่ผลงาน | พ.ศ.2543 |
| คำสำคัญ | หุ่นยนต์ฮิวมานอยด์ |
บทคัดย่อ
การวิจัยพัฒนาเทคโนโลยีทางด้านหุ่นยนต์นั้น ในอดีตมุ่งเน้นไปในทางด้าน Fixed Robots ที่ใช้ในโรงงานอุตสาหกรรมเพื่อเพิ่มประสิทธิภาพและประสิทธิผลในการผลิต แต่ยังมีงานอีกหลายประเภทที่ไม่สามารถใช้ Fixed Robots เข้าทำงานได้ เช่น งานสำรวจในที่ที่อันตรายเป็นต้น ในปัจจุบันสถาบันการศึกษาชั้นนำหลายแห่งของโลก หันมาให้ความสนใจวิจัยและพัฒนาเทคโนโลยีทางด้านหุ่นยนต์เคลื่อนที่ (Mobile Robots) ที่ใช้ขาสองขา (Biped) ในการเคลื่อนที่มากขึ้นอาทิเช่น M.I.T, Harvard University, Stanford University และ Waseda University (JAPAN) หรือแม้กระทั่งบริษัทผลิตรถยนต์รายใหญ่อย่าง HONDA ยังทุ่มเงินนับพันล้านเยน เพื่อวิจัยและสร้าง ?HONDA HUMANOID ROBOT? ออกมาเป็นที่ประจักษ์สายตาแก่ชาวโลก ทั้งนี้เนื่องจาก Mobile Robot ที่ใช้ขาแบบสองขามีความคล่องตัวสูงและสามารถเคลื่อนที่ไปในที่ซึ่ง Mobile Robot แบบล้อไปได้ยาก
ทางศูนย์ปฏิบัติการพัฒนาหุ่นยนต์ภาคสนาม (FIBO) มหาวิทยาลัยเทคโนโลยีพระจอมเกล้า ธนบุรี ได้ตระหนักและเล็งเห็นถึงความสำคัญของเทคโนโลยีที่ประเทศไทยสามารถพัฒนาขึ้นจากการทำวิจัยด้าน Humanoid Robot เช่น Real-time Three Dimensional Balancing ทางศูนย์ FIBO ได้มีแผนการวิจัยและสร้างหุ่นยนต์ต้นแบบสองขาโดยใช้วิธีขยายผลการวิเคราะห์เชิงพลศาสตร์ของ Thomas R. Kane, ZMP, Gravity Reaction Force, Conservation of Energy, อีกทั้งจะนำความรู้ทางด้านระบบการมองเห็น (Vision System) กระบวนการคำนวณภาพ (Image Processing) และปัญญาประดิษฐ์ (Artificial Intelligence) มาช่วยให้หุ่นยนต์สามารถเคลื่อนที่ได้อย่างมีเสถียรภาพมากขึ้น นอกจากนี้ได้เตรียมการวิจัยในส่วนของ Mobility เพื่อที่ให้หุ่นยนต์สามารถเคลื่อนที่ได้ทุกทิศทุกทาง (Omnidirectional) บนพื้นผิวที่ไม่ราบเรียบ ส่งผลให้หุ่นยนต์สามารถเดินได้อย่างมั่นคง โดยในงานวิจัยนี้เป็นงานวิจัยพัฒนาทางทฤษฎีและตรวจสอบความถูกต้องจากหุ่นยนต์ต้นแบบจริงที่มีการเคลื่อนไหวในช่วงขา โดยขาแต่ละข้างประกอบด้วยหกองศาอิสระ
เราได้กำหนดแผนดำเนินงานวิจัยดังนี้คือ
-
-
- ศึกษาทฤษฎีทางด้านชีวกล (Biomechanics) เพื่อหาตัวแปรที่เหมาะสมในการออกแบบกลไกทางกลของหุ่นยนต์สองขาต้นแบบ
-
-
-
- ทำการวิจัยด้าน Mobility และ Dexterity ของหุ่นยนต์สองขาต้นแบบ
-
-
-
- ออกแบบระบบควบคุมแบบ Passive Real Time และ Active Real Time
-
-
-
- รวมระบบการมองเห็น (Vision System) เข้ากับหุ่นยนต์เพื่อช่วยในการปรับท่าทางในการเดินล่วงหน้าโดยใช้ทฤษฎีปัญญาประดิษฐ์ (Artificial Intelligence)
-
 |
 |
เรากำลังอยู่ในขั้นตอนการวิเคราะห์แบบจำลองทาง Kinematic และ Dynamic ดังแสดงในรูปที่ 1. ซึ่งเป็นแนวความคิดเริ่มแรกในการวิเคราะห์จากแบบจำลองมวลรวมเป็นก้อน (Lump Mass Model) หุ่นยนต์ฮิวแมนด์นอยด์ต้นแบบจะเป็นหุ่นยนต์ตัวแรกของประเทศไทยที่ฟีโบ้ได้เป็นผู้เริ่มต้นสร้างและทำการเผยแพร่เทคโนโลยีใหม่ดังกล่าวโดยผลที่ได้จากการวิจัยจะแสดงให้เห็นถึง ศักยภาพด้านระบบอัตโนมัติที่เกิดจากการวิเคราะห์ทางพื้นฐานเป็นหลัก