

 Legacy of FIBO
Legacy of FIBO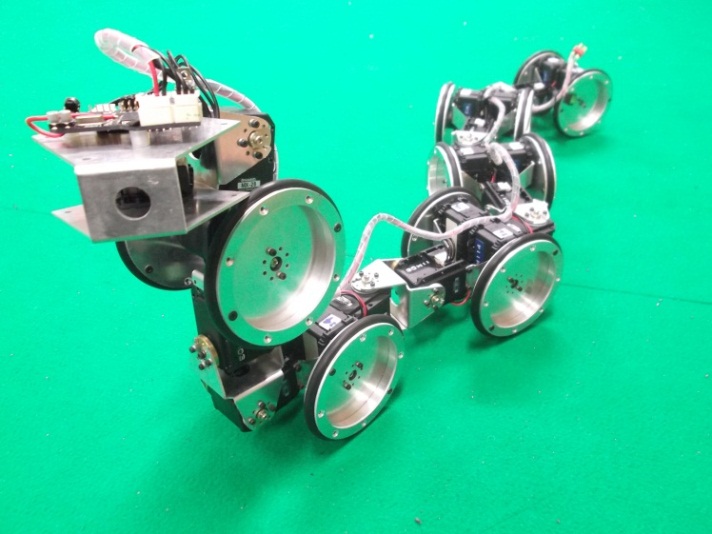
| ชื่อผลงาน | การศึกษาการเคลื่อนที่หุ่นยนต์งู |
| Modular Robot | |
| ชื่อผู้วิจัย | นางสาวฉัตรเกล้า เจริญผล นายบุญเลิศ มณีฉาย นายพงศกร พลจันทร์ขจร นายธัญญ์นิธิ ขุนนิธิวราวัฒน์ |
| ดร.ถวิดามณีวรรณ์ | |
| แหล่งให้ทุน | สำนักงานคณะกรรมการวิจัยแห่งชาติ |
| คำสำคัญ | หุ่นยนต์งู |
บทคัดย่อ
Modular Robot เป็นพื้นฐานของแนวคิดในการพัฒนาหุ่นยนต์เพื่อเลียนแบบหลักการในธรรมชาติ คือการทำงานของเซลล์ในสิ่งมีชีวิตซึ่งมีการทำงานที่มีลักษณะเป็น module กล่าวคือในแต่ละหน่วยการทำงานมีรูปแบบ และการทำงานพื้นฐานที่เหมือน ๆ กัน แต่สามารถต่อกันเป็นโครงสร้างต่าง ๆ ที่มีรูปแบบโครงสร้างที่แตกต่างกันได้ ทั้งยังสามารถตอบสนองต่อสิ่งแวดล้อมที่เปลี่ยนแปลงไป หรือเมื่อมีบางส่วนที่เสียหาย โครงสร้างที่เหลือก็สามารถปรับเปลี่ยนให้ระบบโดยรวมยังทำงานต่อไปได้ ระบบการทำงานแบบ Modular ที่เราพบเห็นในชีวิตประจำวันได้แก่ เซลล์ของมนุษย์, การเคลื่อนของสัตว์ที่ประกอบด้วยข้อต่อ ต่อเรียงกัน เช่น งู หนอน ปลาไหล ปลาหมึก เป็นต้น

MSR-1 หุ่นยนต์งูเพื่อการไต่ และสำรวจท่อในแนวตั้ง
วัตถุประสงค์หลักงานวิจัยนี้คือเพื่อเปรียบเทียบความสามารถในการเคลื่อนที่ในท่อแนวตั้งของแต่ละท่าทางการเคลื่อนที่ที่แตกต่างกันเช่น sinusoidal wave หรือ triangular wave เป็นต้น

MOMO-1 หุ่นยนต์งูล้อเพื่อการสำรวจในพื้นที่ประสบภัย
วัตถุประสงค์หลักงานวิจัยนี้คือเพื่อเปรียบเทียบความสามารถในการเคลื่อนที่บนพื้นเอียงและการเลี้ยวในท่อมุมฉาก เพื่อหารูปแบบการเคลื่อนที่ที่เหมาะสมในการเคลื่อน ที่เข้าไปสำรวจในสภาพสิ่งแวดล้อมนั้นๆ โดยมีการเคลื่อนที่ล้อช่วยในการเคลื่อนที่

MOMO-2 หุ่นยนต์งูล้อแบบแยกล้อขับเคลื่อนซ้าย-ขวา
วัตถุประสงค์หลักงานวิจัยนี้คือเพื่อเปรียบเทียบความสามารถในการเคลื่อนที่ข้ามพื้นที่ต่างระดับ โดยใช้การควบคุมหุ่นยนต์แบบ 3 มิติ เพื่อหารูปแบบการเคลื่อนที่ที่เหมาะสมกับการข้ามพื้นที่ต่างระดับ

MOMO–3 หุ่นยนต์หลายข้อต่อเพื่อการเคลื่อนที่ขึ้นเสา
วัตถุประสงค์หลักงานวิจัยนี้คือศึกษาพฤติกรรมและปัจจัยที่มีผลต่อการเคลื่อนที่ขึ้นเสาของหุ่นยนต์แบบหลายข้อต่อ (Hyper-Redundant Robot) ที่มีล้อในแต่ละชิ้นต่อโยง ด้วยเส้นทางการเคลื่อนที่แบบหมุนเป็นเกลียวรัศมีคงที่ (Helix) และรัศมีไม่คงที่ (Spiral)