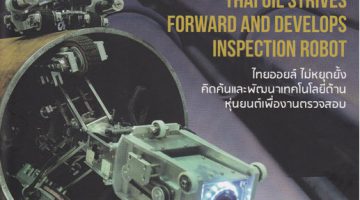
 Legacy of FIBO
Legacy of FIBOผู้ดำเนินการ :
- รศ. ดร. ชิต เหล่าวัฒนา
- ผศ. ดร. อรรณพ เรืองวิเศษ
- นายรุ่งโรจน์ หวังเกียรติ
ดำเนินการให้กับ :
- สถาบันสารสนเทศทรัพยากรน้ำและการเกษตร (สสนก.)

ภาพถ่ายจากทางอากาศเป็นทางเลือกหนึ่งที่ช่วยในการจัดการและวางแผนการใช้ทรัพยากรธรรมชาติที่มีประสิทธิภาพ โดยปกติการเก็บข้อมูลมักใช้ภาพถ่ายจากดาวเทียม ซึ่งมีราคาสูง ความละเอียดของภาพต่ำและไม่สามารถบันทึกภาพผ่านบริเวณที่มีชั้นบรรยากาศหนาแน่นได้สำหรับการถ่ายภาพจากเครื่องบิน ถึงแม้ว่าจะให้ภาพที่มีความละเอียดสูงกว่าภาพถ่ายจากดาวเทียม ยังมีราคาในการปฏิบัติการต่อครั้งค่อนข้างสูง ดังนั้น ทางสถาบันวิทยาการหุ่นยนต์ภาคสนาม (สถาบันฯ) จึงได้นำเสนอเทคโนโลยีอากาศยานไร้นักบิน (Unmanned Aerial Vehicle: UAV) มาทดแทนการดำเนินงานดังกล่าว โดยมีสถาบันสารสนเทศทรัพยากรน้ำและการเกษตร (องค์การมหาชน) (สสนก.) เป็นผู้ใช้งาน โครงการนี้เป็นโครงการที่พัฒนาต่อยอดมาจากโครงการ UAV เดิมที่ได้เคยดำเนินงานร่วมกับ สสนก. เน้นการวิจัยและพัฒนา UAV ให้มีความสามารถในการบินนานขึ้นควบคู่กับการพัฒนาอุปกรณ์สนับสนุนการปฏิบัติภารกิจจริง
![]()