 Legacy of FIBO
Legacy of FIBOผู้ดำเนินการ :
- ดร. สุริยา นัฏสุภัคพงศ์
- นายรุ่งโรจน์ หวังเกียรติ
ดำเนินการให้กับ :
- สถาบันสารสนเทศทรัพยากรน้ำและการเกษตร (สสนก.)

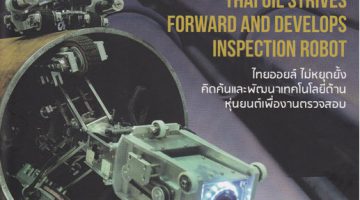
สืบเนื่องจากสภาพอากาศของโลกที่เปลี่ยนแปลงไป ภัยพิบัติในรูปแบบต่างๆ มีแนวโน้มเพิ่มสูงมากขึ้นในทุกปี โดยเฉพาะอย่างยิ่งเหตุการณ์มหาอุทกภัยในกรุงเทพมหานครเมื่อปี 2554 เป็นสิ่งกระตุ้นให้มีการเร่งดำเนินการเพื่อหามาตรการป้องกันน้ำท่วมที่มีประสิทธิภาพยิ่งขึ้น หนึ่งในวิธีการเตรียมความพร้อมได้แก่การสำรวจเพื่อหยั่งความลึกของแม่น้ำลำคลองสายต่างๆ เพื่อเป็นข้อมูลในการจัดการและวางแผนการระบายน้ำ ซึ่งในที่นี้การรู้ถึงหน้าตัดของลำน้ำ (Cross Section) ตลอดสายมีความสำคัญยิ่ง ดังนั้น สถาบันวิทยาการหุ่นยนต์ภาคสนามจึงได้วิจัยและพัฒนาเรือไร้คนขับ (Unmanned Surface Vehicle) สำหรับช่วยในการดำเนินงานดังกล่าว