 Legacy of FIBO
Legacy of FIBOผู้ดำเนินการ :
- ดร.ถวิดา มณีวรรณ์
- นายรุ่งโรจน์ หวังเกียรติ
- นายนาถพงศ์ แก้วเหล็ก
- นายธัญญ์นิธิ ขุนนิธิวราวัฒน์
ดำเนินการให้กับ :
- บริษัทในอุตสาหกรรมปิโตรเคมี
 [1]
[1]
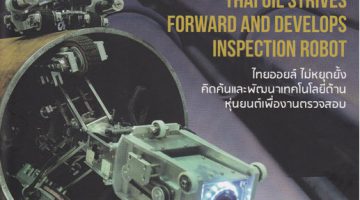
เนื่องจากในโรงงานอุตสาหกรรมปิโตรเคมี มีระบบที่เกี่ยวข้องกับของไหล และก๊าซเป็นจำนวนมาก โดยของไหลต่างๆ จะถูกลำเลียงผ่านท่อส่งไปยังสถานีต่างๆ ซึ่งท่อที่ใช้ลำเลียงเหล่านี้ จำเป็นต้องมีการซ่อมบำรุงอยู่สม่ำเสมอ ตามรอบของการซ่อมบำรุง เพื่อหารอยรั่วซึมตามจุดต่างๆ หรือสิ่งที่อาจก่อให้เกิดปัญหาอื่นๆตามมา ซึ่งในปัจจุบันการตรวจหารอยรั่วต่างๆ ทำได้ยาก และใช้เวลามาก ทางฝ่ายซ่อมบำรุงจึงมีความต้องการให้ทางสถาบันวิทยาการหุ่นยนต์ภาคสนามออกแบบ พัฒนาและจัดสร้างระบบตรวจสอบภายในท่อขึ้น ซึ่งต้องเริ่มต้นจากขั้นตอนของการศึกษาความเป็นไปได้ในการพัฒนาก่อน เพื่อทำการศึกษาและวิเคราะห์ข้อมูลเบื้องต้นก่อนการออกแบบและจัดสร้างต่อไป
[1] H. R. Choi and S. M. Roh, “In-pipe robot with active steering capability for moving inside of pipelines,”
Bioinspiration and Robotics: Walking and Climbing Robots, Book edited by M. K. Habib, 2007.
![]()